
Ground-Penetrating Radar FAQ
Every GPR system contains one or more antennas that transmit and receive radio frequency waves. These radio waves penetrate the surface that the antenna is touching or in close proximity to. While much of the signal dissipates, a percentage of the signal comes back to be received by the antenna. This return signal generates visual data that can be recorded, interpreted and manipulated. The data is displayed on a control unit as images that give the operator the ability to see the size of objects and the depths at which they are located.
GPR has the same basic principles as a metal detector. A metal detector sends energy into the earth in up to 17 frequencies. When that energy meets a metallic object, it is translated into a recognizable tone. Similarly, GPR sends out millions of frequencies that return to the antenna and provide visual data of the subsurface and objects buried within.
Radar is sensitive to changes in material composition. Detecting these changes requires movement. In the case of air traffic control radar, the targets are moving, so a stationary transmitter works. GPR systems, however, are designed to locate stationary targets, so one must move the radar to detect them.
US Radar GPR Systems are engineered to display differences in material composition. They can be used for locating objects with different compositions than their surrounding materials. A PVC pipe, for example, has a different composition than the surrounding soil. Similarly, voids and excavations that have been filled in will also have different compositions than the surrounding soil.
One should note, however, that GPR cannot determine the actual materials that the system is imaging. For this reason, it is not suited for locating gold, precious gems, or other treasure.
Here are some objects that GPR can help you find.
Utility Service: Clay Pipes, Plastic/PVC, Concrete Pipe, Transite Pipe, Metal Pipe, missing Valves, Water Boxes, Abandoned Lines, Illegal/Unkown Connection, Conduit, Water/Wastewater, Gas, Power, CATV, Telecom Wire, Fiber Optic, Septic Tanks, Voids, Manholes, and More
Structural Analysis: Reinforcing, Cracking, Voids, Concrete Sparling, Slab/Wall Thickness, Asphalt Layer Thickness, and More
Geotechnical: Density Changes, Fill Placement, Boulders/Rocks, Root Mass, Disturbed Soil, Buried Wood, and More
Law Enforcement: Weapons, Drugs, Cadavers, Cash, and More
Environmental: Contaminant Plumes/Migrations, Landfill Limits, Buried Drums, and More
Humanitarian: UXO, Graves, and More
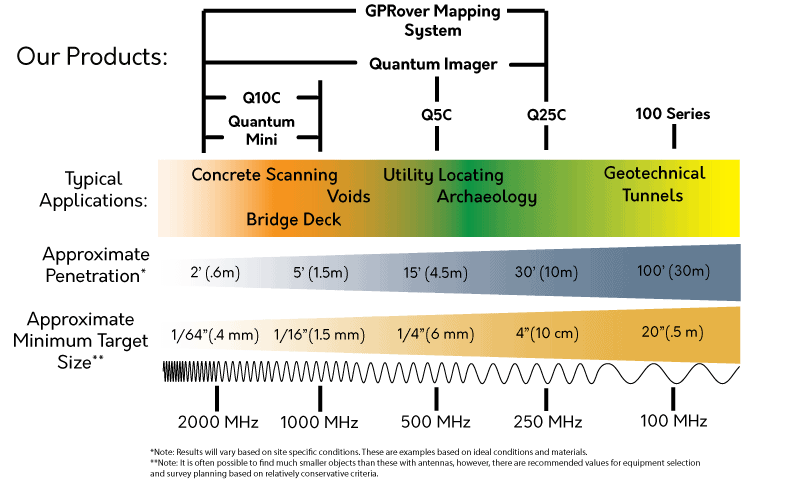
The 500 MHz antenna is the antenna which is most widely used for locating utilities.
The 1000 MHz antenna is the most widely used for locating rebar and utilities in walls and floors.
One should not that, if it is not possible to reach the depth of a buried utility due to soil conditions, it is still often possible to detect the disturbed soil from the original excavation.
A common misconception is that the size of the antenna affects the amount of area covered. The truth is that the size of the antenna relates to the frequency of the antenna and subsequently, the depth that it can penetrate (for more information see: How deep does it go?). While the signal from a GPR antenna does spread in the direction of travel, the lateral width which it scans per pass is razor thin regardless of the antenna used. Furthermore, targets are most easily identified with GPR when the survey path is perpendicular to the orientation of the target. For this reason, surveys are usually conducted on a grid in two perpendicular directions:
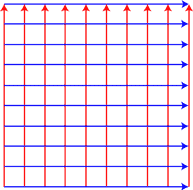
A typical GPR survey pattern for walls and floors
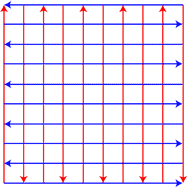
A typical GPR survey pattern for ground surveys
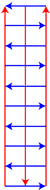
A typical GPR survey pattern along a proposed trenchline
Grid spacing is determined based on the size of the targets that need to be identified and what sort of results are going to be produced from the survey. Typical grid spacings can be 1m, 3ft, 5ft, 10ft, 20ft for ground surveys and 1in-1ft. for walls and floors.
The speed at which data can be collected along a survey line is limited by two factors: 1) time the system requires to process data and 2) surface conditions. The carts for our Quantum, Q5, Q25, and GPRover systems are the market’s most rugged and all-terrain capable. The unique design enables the antenna to “float” within the frame providing unparalleled surface contact in all types of terrain.
Almost. Radar is the only remote sensing technology that can detect both conductive and non-conductive materials. Although radar can easily see conductive materials such as metal and salt water, it cannot see through them. Also, concrete is conductive when it is fresh, but becomes non- conductive as it cures.
Generally, GPR will reveal the horizontal positioning of targets in their exact locations. However, there are a number of factors which can affect the speed and accuracy of depth measurements. These include soil type and moisture content, among others.
The radar signal velocity depends on the composition of the material being scanned and the depth of the target. For example, the signal will travel slower through soil types that are more difficult to penetrate. Similarly, the depth between the antenna and its target is calculated based on the amount of time that it takes for the radar signal to be reflected off of the target and back to the system.
Monocline Quantum 2
The moisture content of the material also affects the velocity of the signal. Though it is usually not possible to know the exact velocity that the GPR signal travels through the material, it is usually possible to estimate this within 90% accuracy. It is possible to use a depth to a known object to determine a precise velocity and thus calibrate the depth calculations. However, this technique is only successful when the material has a consistent composition, like concrete.
There is one inescapable limitation, however. Due to natural differences in the composition of geological layers, the exact velocity of a signal will vary from one point to the next when investigating underground. There are some techniques for modeling the variations in velocity along the survey path, but these are ultimately estimations and are not completely precise.
Selecting the right GPR system for your specific needs depends on the application you are using for; such as construction, utility locating, archaeology, etc. The application often determines the required depth of penetration and resolution capabilities. Users who need data from different depth ranges, want more comprehensive data, and have broader needs require multi-frequency systems.
If you want to learn more about our products, please visit our products page.
If you have any other questions, please contact us.