
About Ground-Penetrating Radar
What is Ground-Penetrating Radar?
Ground-penetrating radar is a noninvasive method for surveying land and finding underground objects. GPR utilizes radio waves to detect underground utilities, sources of water, buried objects, and more. By providing accurate and intuitive technology, professionals across various industries can save time and money on geophysical locating services.

GPR data can be easily understood with a minimal amount of training and practice. Many of our customers report that they become proficient in acquiring and interpreting GPR data within the span of a day.
It is important to understand that radar signals emitted by a GPR device spread in a fan shape in the direction of travel when scanning. This creates a razor-thin signal with no width to it at all. The signal then broadens as it passes through the subsurface. Because of this an object will be visible to the radar before and after moving directly over it. This is the reason that a point-shaped object will show up as a hyperbola (arc shape) on the imaging data.
Since the GPR signal will always act quickest when the antenna is directly over the target, the center line of the subsurface object will always be the highest point of the hyperbola on the data.
An example of unprocessed 2D GPR data of two pipes:
3D GPR Data
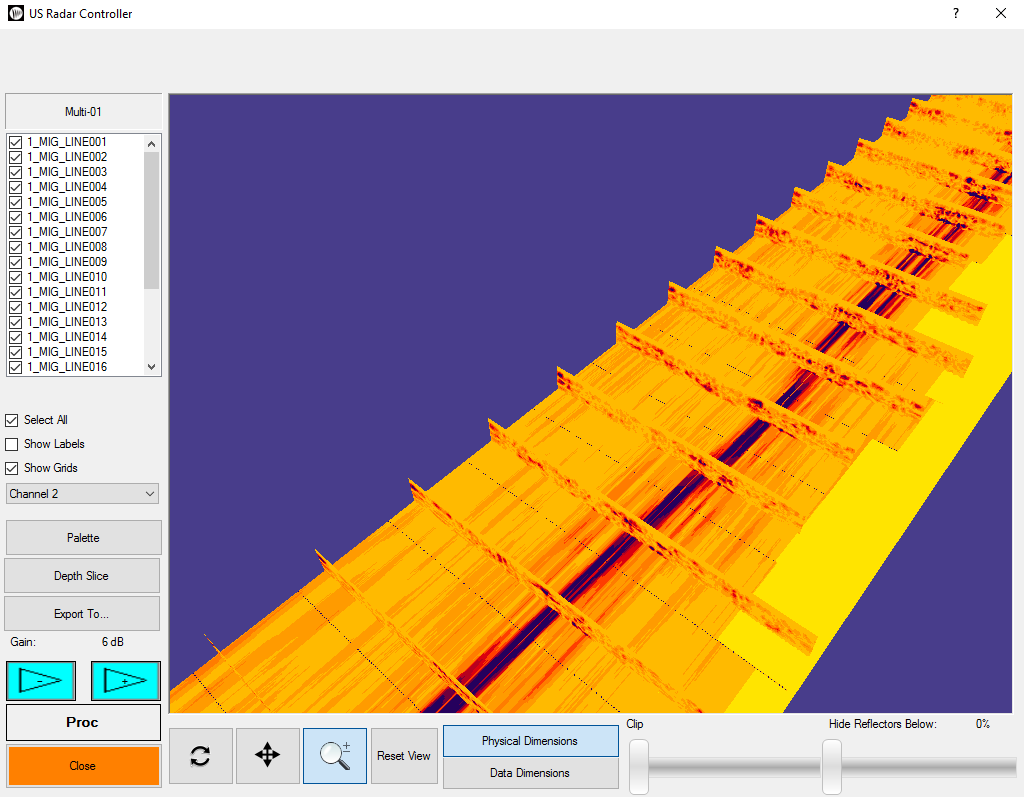
3D data can be represented in one of 3 ways: 3D alignment of 2D traces, one or more depth slices, or isosurfaces.
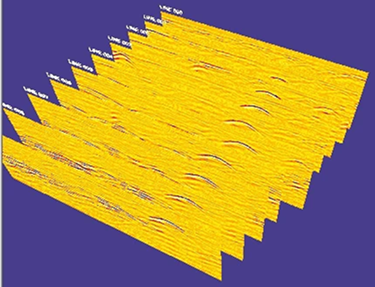
3D alignments of 2D traces requires Almost no post-processing. This results in faster production and the least amount of assumptions regarding velocity variation. The images align sequentially and the data analyst can determine the findings by examining them.
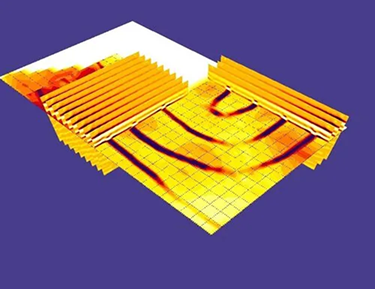
Depth slices Require an accurate model of the velocity of the medium being investigated. The more consistent the material is (i.e., concrete structures), the quicker and easier it is to achieve this. In some cases, velocity can be measured and sometimes worked out through a combination of educated guesses and trial and error. Depth slices tend to be good for modeling linear features, such as rebar and conduit.
Isosurfaces Require the most amount of post-processing and filtering. However, the end result is often the most desirable for those that need to construct a full 3D model of their findings. The results are effective for modeling complex features, but also have a tendency to filter out smaller and finer features. Depending on project needs, this can be the most desirable data representation.
Planning a GPR Survey
There are three main approaches to surveying with ground-penetrating radar. The method you choose depends on desired outcome and whether real-time results are required or if post-processing is desired.
If the goal is to identify one or more specific targets, the easiest way to achieve this is to examine the survey site for any clues, such as manholes, catch basins, valves, or other factors of interest. These environmental touch-points can serve as an excellent starting location for investigation. Here, one would move the radar antenna across the surface until the presence of an object is detected on screen. The operator would then determine the precise center of the object and can then mark this on the ground or log GPS coordinates of the point. After this, move over and repeat the process; essentially tracing the target. This works best when real-time results are needed.
A markout is generally accomplished by scanning a site on a grid pattern. The operator marks the target’s location on the ground when detected; usually in the form of a flag or spray-painted mark. The radar data will only reveal that a target is in the earth with a different composition than the surrounding material. Because of this one, should make multiple passes over the object to determine if it is rock, utility, or other material.
The easiest way to differentiate buried objects is to make another pass and see if the target continues or not. One can choose to either place marks at every target and connect the dots later or to immediately move over and make another pass on the target to determine if it is linear or not.
More complex sites with many targets can also benefit from using 3D GPR data. Generating 3D data requires that data be collected on a regular grid in perpendicular directions and also usually entails some degree of post-processing. The amount of post-processing required increases as the uniformity of the medium being investigated decreases.
There is an additional correlation between the uniformity of the soil being investigated and the clarity of the of the radar image produced through post-processing. Usable 3D presentations usually require that data be collected on a much a denser grid than necessary with 2D data. In many cases, the number of survey lines is doubled or quadrupled. For these reasons, 3D data tends to be used more often on smaller scale surveys of concrete floors and walls than on large-scale ground surveys.



System Configurations
There are two basic model configurations for our GPR systems: Cart and Handheld. Handheld units feature 1000 MHz antennas, 2000 MHz antennas, or both. These units are ideal for scanning floors and walls but generally do not provide sufficient penetration depth to locate buried utilities outdoors.
Cart systems are modular, expandable, and support a wide range of antennas—from 100 MHz to 2000 MHz. They can be configured for handheld use on walls and floors or as cart-based systems for outdoor surveys. Cart systems can also interface with nearly any available GPS unit.
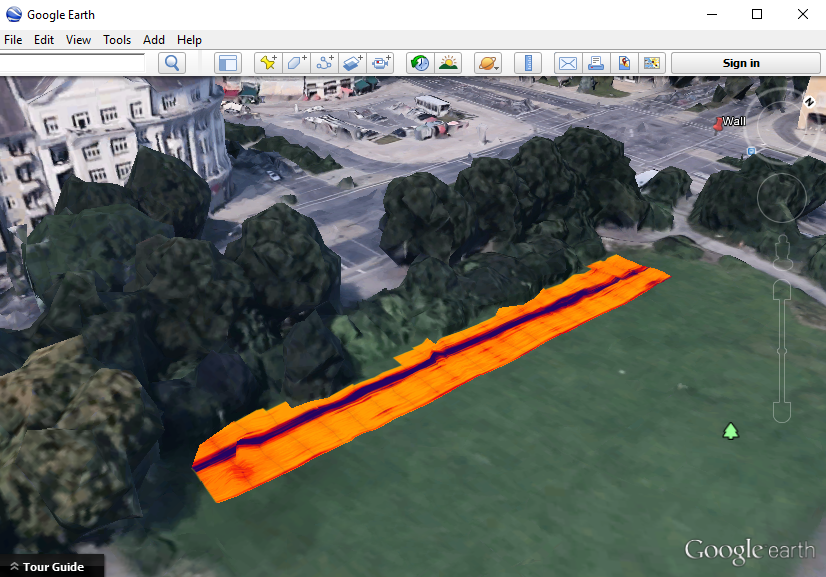
GPS Integration
The Quantum Imager, GPRover, Q Series, and 100 Series can be integrated with almost any type of GPS from handheld to RTK. For most applications, GPS positions are logged constantly while surveying. In the field, or at the office, points of interest are logged for future reference and can have numbers and descriptions assigned to them. These points can then be exported for immediate use in spreadsheets, databases, GIS and CAD Software, and more. For certain, specialized applications, such as lakes and irregular topography, GPS positioning can be used to trigger each scan made by the system. high-accuracy RTK GPS systems are usually the type of GPS system which yields the best results for these applications.

Safety Information
Electromagnetic emissions from ground-penetrating radar equipment manufactured by US Radar Inc. do not constitute a safety or health hazard under normal operating conditions. The emissions are far below the 10mW/cm² (100W/m²) level specified by the United States Occupational Safety and Health Administration (OSHA) regulations and similar regulations in other jurisdictions.
Here is the average power density data at 50mm:
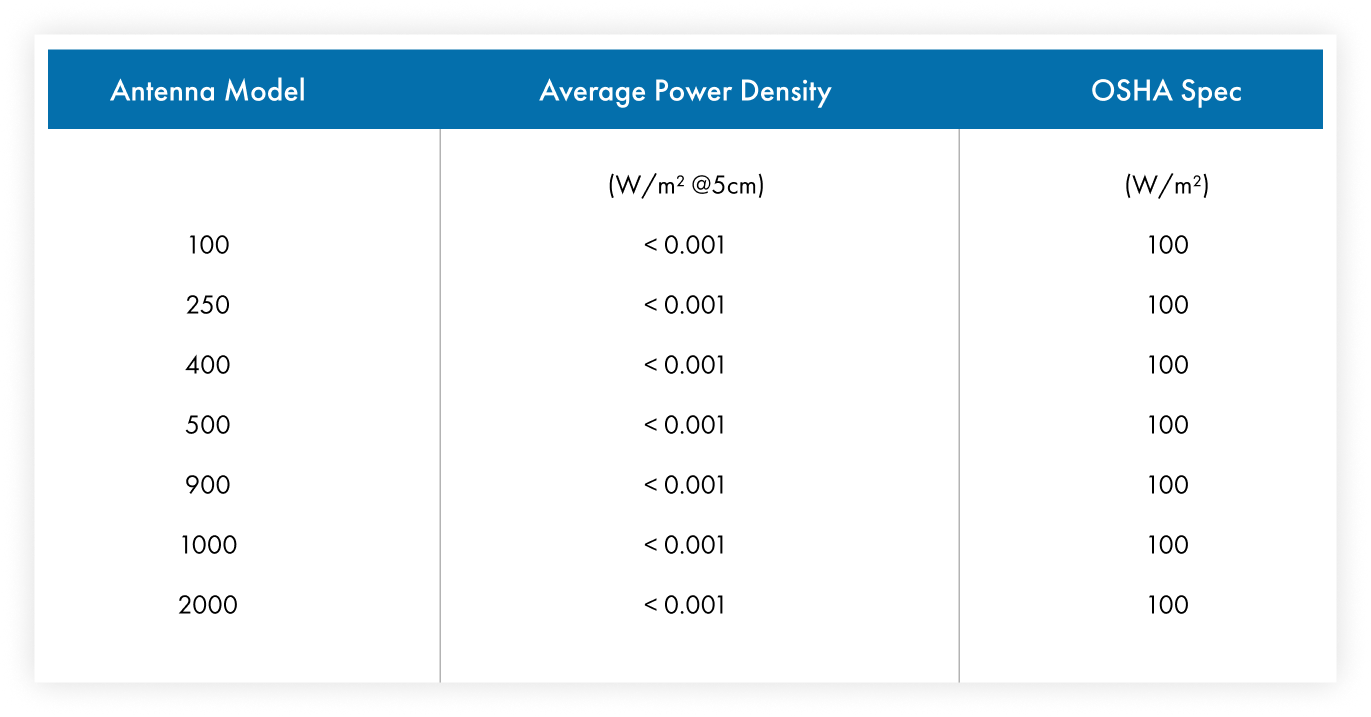
| Antenna Model | Average Power Density | OSHA Spec |
|---|---|---|
| 100 | (W/m² @5cm) | (W/m²) |
| 250 | < 0.001 | 100 |
| 400 | < 0.001 | 100 |
| 500 | < 0.001 | 100 |
| 900 | < 0.001 | 100 |
| 1000 | < 0.001 | 100 |
| 2000 | < 0.001 | 100 |
Want to Learn More About How Ground Penetrating Radar Works?
Contact us anytime and one of our team members can help you better understand the technology, its applications, and which systems may best fit your specific needs.